条件随机场(conditional random field)是一个比感知机更加强大的模型。
背景知识
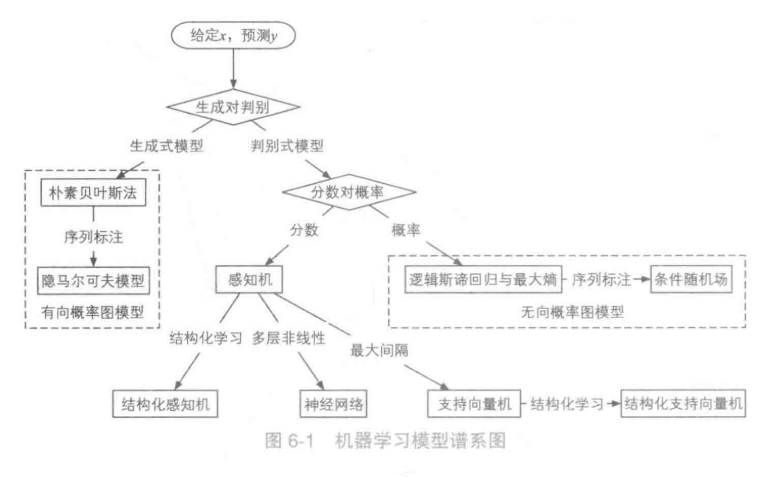
机器学习模型谱系图
Sklearn对应机器学习算法决策树

使用模板:

生成式模型
模拟数据的生成过程,且随机变量x,y存在因果先后关系:现有y再有x。这种关系通过联合分布模拟:
p(x,y)=p(y)p(x∣y)
具体流程:
- 根据p(y)采样y
- 根据p(x|y)采用x
- 生成样本概率p(x,y)
- 通过遍历y的所有取值,获得最大的P(x,y)作为预测结果
通过p(x,y),可以求得p(x)。
p(x)=y∈Y∑p(x,y),Y为的取值
但是,p(x)很难准确估计。因为特征之间并不是相互独立的,存在一定的依赖关系。
eg: 中文分词的一元语法:字符“榴”的后一个字符可以确定是“莲”,但是生成式模型直接认为这两个字符相互独立,忽略的这种依赖关系,导致不合符实际。
判别式模型
对生成式模型的改进。跳过了p(x),直接对p(y|x)建模。这样不需要考虑x内的各种依赖关系。
在生成式和判别式中,模型都是多维度随机变量分布。这些随机变量可能相互独立,也可能相互依赖,可以通过概率图模型来进行分析多维随机变量分布。
有向和无向概率图模型
概率图模型
通过图来表示p(x,y),利用结点来表示随机变量,用边来表示有关联的随机变量。
有向图模型
将事情通过前后因果顺序进行连接为有向图。
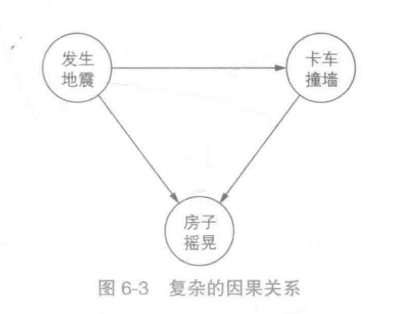
“发生地震”和“卡车撞墙”会导致“房子摇晃”,同时“发生地震”也会导致“卡车撞墙”,于是将"卡车撞墙"和"发生地震"指向"房子摇晃","发生地震"指向"卡车撞墙"。
于是多维随机变量的分布可以分解为:
p(x,y)=v∈V∏p(v∣π(v)),V=图的所有结点,π(v)=v的前驱结点
马尔科夫链就是有向图中的一个例子。
无向图模型:
不需要探究事情的前因后果。仅仅指向有关联的结点。
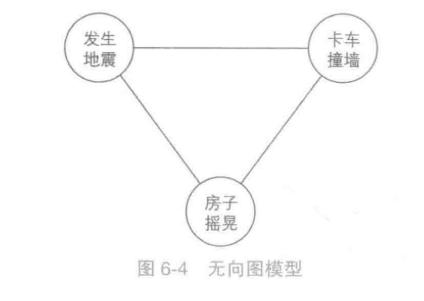
无向图将概率分解为所有最大团上的某函数的乘积。
团: 无向图的完全子图。
极大团:如果一个团不被其他任一团所包含,即它不是其他任一团的真子集,则称该团为图G的极大团
最大团:最大团就是就是结点数最多的极大团。
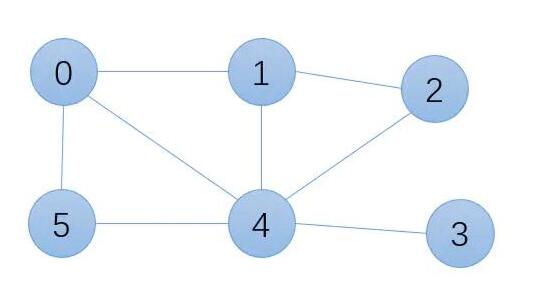
在上图中,
团有很多:{0,5},{0,1},{0,4,5},{1,2,4}...
极大团:{0,4,5},{1,2,4},{0,1,4},{4,3}
最大团:{0,4,5},{1,2,4},{0,1,4}
无向图模型定义了一些虚拟的因子节点,每个因子节点只连接部分节点,组成更小的最大团
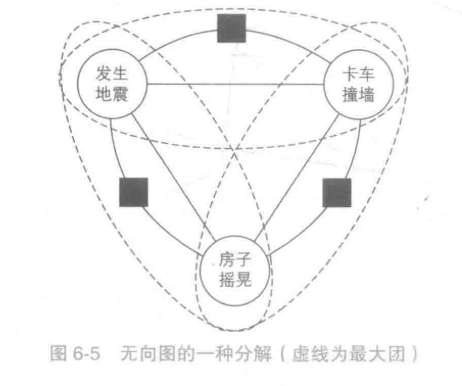
这样,该图的最大团由一个变为了4个,每个最大团变量节点变为了两个。于是,将多为随机变量的联合分布分解为了各个最大团中的因子的乘积。并且该分布为判别式模型最需要的条件概率分布。
p(y∣x)=p(x,y)=Z1a∏Ca(xa,ya)a是因子节点,Ca是因子节点对应的函数,xa,ya是因子节点所有连接的变量节点Z=x,y∑a∏Ca(xa,ya)(也就是归一化)
在机器学习中,通常将因子函数设为:
Ca(xa,ya)=exp{k∑Wakfak(xa,ya)}其中k为特征编号,fak(xa,ya)为特征函数,Wak为特征的权重
条件随机场
是一种判别式模型,通过输入x,求P(y|x)。
对于HMM模型,我们是利用前一个状态转移的当前的状态,可以理解成是用前一个状态“生成”了当前的状态。
条件随机场是根据周围节点的状态来“判别”当前状态的概率。
线性链条件随机场
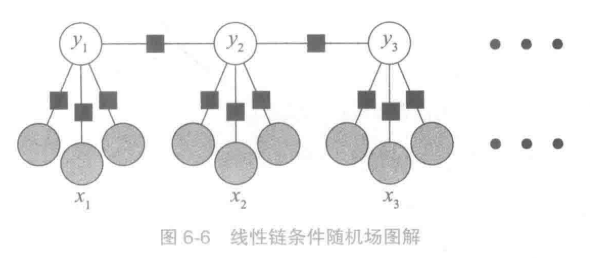
上图中,有x1,x2,x3三个变量,对应了y1,y2,y3三种状态,每个x有三个特征(灰圆球的数量)。
黑方块为因子节点也就是特征函数。将x和对应的y作为状态特征,y_{t-1}的特征作为转移特征。
于是线性链条件随机场的定义如下:
P(yt∣xt)=Z(x)1Ct(yt−1,yt,xt)=Z(x)1exp{k=1∑KWkfk(yt−1,yt,xt)}其中:Z(x)=y∑exp{k=1∑KWkfk(yt−1,yt,xt)}K为特征数,fk为特征函数,Wk为特征的权重
将该式子进行化简:
define:W={W1,W2,...,Wk}TF(yt−1,yt,xt)={f1(yt−1,yt,xt),...,fk(yt−1,yt,xt)}so:P(yt∣xt)=Z(x)exp(WF(yt−1,yt,xt))
CRF的三个问题
与HMM一样,CRF也存在着三个待求解的问题。在HMM中,我们将观测序列按照时刻逐个的进行计算,但是在CRF中,我们无需拆开观测序列X,相比而言,CRF更加的容易。下面我们具体描述CRF的三个基本问题:
- 评估问题: 概率计算的问题。给定P(Y|X), 输入序列X和输出序列Y时,求P(Y_i|X)和P(Y_i,Y_{i-1}|X)的条件概率。
- 学习问题,也就是采用训练数据X,Y训练CRF中的权重参数和条件概率。
- 解码问题,给定CRF,条件概率分布P(Y|X),观测序列X,求解条件概率最大的状态序列Y。
评估问题
给定相关的约束条件,即给定相关的特征函数和对应的特征函数的权重值。处理这个问题的基本算法采用前向,后向算法,其中我们定义给定的条件随机场:γ
定义:Mi(yi−1,yi∣x)=exp(k=1∑Kwkfk(yi−1,yi,x))这个式子定义了在给定yi−1时,从yi−1转移到yi的非规范化概率这样,我们很容易得到序列位置i+1的标记是yi+1时,之前的部分标记序列的非规范化概率递推公式:前向概率:αi+1(yi+1∣x)=αi(yi∣x)[Mi+1(yi+1,yi∣x)],i=1,2,...,n+1定义:α0(y0∣x)={1,y0=start0,else我们定义βi(yi∣x)表示序列位置i的标记是yi时,之后的从i+1到n的部分标记序列的非规范化概率后向概率:βi(yi∣x)=[Mi+1(yi,yi+1∣x)]βi+1(yi+1∣x),i=1,2,...,n+1定义:βn+1(yn+1∣x)={1,yn+1=stop0,else
于是我们可以计算出计算序列位置i的标记是yi时的条件概率P(Yi=yi∣x):P(Yi=yi∣x)=Z(x)aiT(yi∣x)βi(yi∣x)也能够计算序列位置i的标记是yi,位置i−1的标记是yi−1时的条件概率P(Yt−1=yt−1,Yt=yi∣x):P(Yt−1=yt−1,Yt=yi∣x)=Z(x)ai−1T(yi−1∣x)Mi(yi−1,yi∣x)βi(yi∣x)
学习问题
我们给定训练数据集X和对应的标记序列Y,K个特征函数fk(x,y),需要学习模型参数特征权重和条件概率Pw(y|x),其中条件概率Pw(y|x)和模型权重wk满足以下关系
Pw(y∣x)=P(yt∣xt)=Zw(x)exp(∑k=1KWkfk(yt−1,yt,xt))
梯度下降法求解
在使用梯度下降法求解模型参数之前,我们需要定义我们的优化函数,这里采用极大似然函数作为目标函数:
L(w)=logx,y∏Pw(y∣x)P¯(x,y)=x,y∑P¯(x,y)logPw(y∣x)
令f(w)=−log(L(W)),再对f(w)求导,则有下面的公式为:∂w∂f(w)=x,y∑P¯(x)Pw(y∣x)f(x,y)−x,y∑P¯(x,y)f(x,y)
有了w的导数表达式,就可以用梯度下降法来迭代求解最优的w了。注意在迭代过程中,每次更新w后,需要同步更新Pw(x,y),以用于下一次迭代的梯度计算。
解码问题
给定条件随机场的条件概率P(y|x)和一个观测序列x,要求出满足P(y|x)最大的序列y。
解决问题和HMM类似,采用维特比算法。
例子
假设输入的都是为三个词的句子,即 X=(X1,X2,X3) ,输出的词性记为 Y=(Y1,Y2,Y3) , 其中Y∈{1(名词),2(动词)} ,标记出取值为1的特征函数如下:
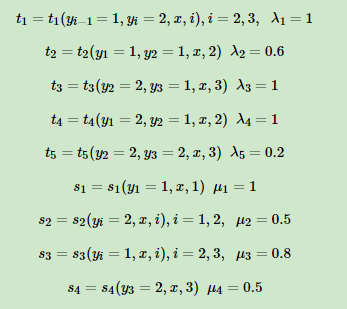
t为特征函数只和当前节点和上一个节点有关
s为特征函数只和当前节点有关
r,μ为特征权重
求观测序列(x1,x2,x2)最可能的标记序列。
解:
首先计算第一个句子词性为1,2的非规范化概率:δ1(1)=μ1s1=1δ1(2)=μ2s2=0.5
接下来进行递推,计算第二个句子:δ2(1)=max{δ1(1)+t2λ2+μ3s3,δ1(2)+t4λ4+μ3s3}=max{1+0.6+0.8,0.5+1+0.8}=2.4δ2(2)=max{δ1(2)+μ2s2,δ1(1)+t1λ1+μ2s2}=max{0.5+0.5,1+1+0.5}=2.5
然后计算第三个句子:δ3(1)=max{δ2(1)+μ3s3,δ2(2)+t3λ3+μ3s3}=max{2.4+0.8,2.5+1+0.8}=4.3δ3(2)=max{δ2(1)+t1λ1+μ4s4,δ2(2)+t5λ5+μ4s4}=max{2.4+1+0.5,2.5+0.2+0.5}=3.9
比较max(δ3(1),δ3(2),得到y3=1,再逆推回去
即最终的结果为(y1,y2,y1),即标记为(名词,动词,名词)。
实现
from pyhanlp import *
from pyhanlp.static import download, remove_file, HANLP_DATA_PATH
import os
import zipfile
CRFSegmenter = JClass('com.hankcs.hanlp.model.crf.CRFSegmenter')
CRFLexicalAnalyzer = JClass('com.hankcs.hanlp.model.crf.CRFLexicalAnalyzer')
CWSEvaluator = SafeJClass('com.hankcs.hanlp.seg.common.CWSEvaluator')
CRF_MODEL_PATH=None
CRF_MODEL_TXT_PATH=None
root_path=None
#创建测试数据路径
def test_data_path():
data_path = os.path.join(HANLP_DATA_PATH, 'test')
os.mkdir(data_path)
CRF_MODEL_PATH = data_path + "/crf-cws-model"
CRF_MODEL_TXT_PATH = data_path + "/crf-cws-model.txt"
return data_path
# 下载MSR语料库
def ensure_data(data_name, data_url):
root_path = test_data_path()
dest_path = os.path.join(root_path, data_name)+'.zip'
download(data_url, dest_path)
with zipfile.ZipFile(dest_path, "r") as archive:
archive.extractall(root_path)
remove_file(dest_path)
dest_path = dest_path[:-len('.zip')]
return dest_path
sighan05 = ensure_data('icwb2-data', 'http://sighan.cs.uchicago.edu/bakeoff2005/data/icwb2-data.zip')
msr_dict = os.path.join(sighan05, 'gold', 'msr_training_words.utf8')
msr_train = os.path.join(sighan05, 'training', 'msr_training.utf8')
msr_model = os.path.join(test_data_path(), 'msr_cws')
msr_test = os.path.join(sighan05, 'testing', 'msr_test.utf8')
msr_output = os.path.join(sighan05, 'testing', 'msr_bigram_output.txt')
msr_gold = os.path.join(sighan05, 'gold', 'msr_test_gold.utf8')
## 以下开始 CRF 中文分词
def train(corpus):
segmenter = CRFSegmenter(None) # 创建 CRF 分词器
segmenter.train(corpus, CRF_MODEL_PATH)
return CRFLexicalAnalyzer(segmenter)
segment = train(msr_train)
print(CWSEvaluator.evaluate(segment, msr_test, msr_output, msr_gold, msr_dict)) # 标准化评测
由于运行过程太占时间和内存,直接使用书上的结果图

总结
CRF和HMM有很多相似之处,都包含了评估、学习、解码问题。两者都可以用于序列模型,因此都广泛用于自然语言处理的各个方面。
但是两者还是有所不同的,最大的不同点是CRF模型是判别模型,而HMM是生成模型。
