HNSW
在使用 RAG(Retrieval-Augmented Generation)时,我们通常需要在大量文本向量中,找到与查询最相似的若干条语句。最直观的方式是对所有向量逐一计算相似度(余弦相似度、欧氏距离等),然后进行比较。在数据规模较小时,这种方法尚可接受;但当数据量达到百万甚至更高量级时,逐一匹配将带来巨大的时间开销。
HNSW(Hierarchical Navigable Small World)正是针对这一问题提出的一种高效近似最近邻搜索方法。
概述
HNSW是一种用于高效搜索高维向量的数据结构,主要应用于近似最近邻(Approximate Nearest Neighbor, ANN)搜索场景。
它通过牺牲极少量精度,大幅降低在大规模数据集上进行相似度检索的计算成本。HNSW 将基于图的搜索方法与分层结构相结合,在搜索速度与准确率之间取得了良好的平衡,因此被广泛应用于推荐系统、图像检索、语义搜索以及自然语言处理等任务中。
为了更好地理解 HNSW 的设计思想,有必要先介绍对其影响最大的两种技术:跳表(Skip List) 和 NSW(Navigable Small World)图。
跳表
跳表在1990年由William Pugh提出,是一种基于概率的多层链表结构。在跳表中,每个节点不仅包含数据元素,还维护着指向不同层级后继节点的指针,用以加速查找过程。
跳表最底层(第 0 层)包含全部元素,结构等价于一个有序链表;而越往上层,节点数量越少,指针跨度越大。查询操作从高层开始,通过“跳跃”快速缩小搜索范围,再逐层向下逼近目标位置。由于跳表在保持链表插入效率的同时显著提升了查询性能,它被广泛应用于工程实践中,例如 Redis 的有序集合(ZSet)底层实现。
跳表的查询过程如下所示:查询从最高层开始,如果发现当前节点中的元素大于查询的目标值,那么就会回退一个节点,并在这个节点的下一层进行查询,一直重复这个过程,直到查询到目标值,如下图所示。
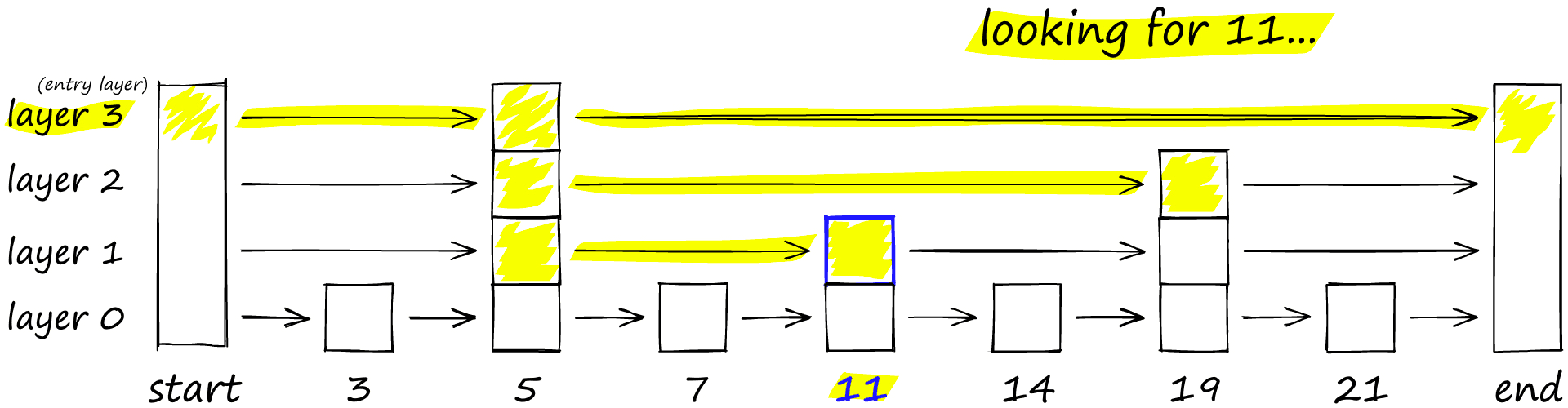
HNSW继承了跳表分层的思想,高层具有较长的边(用于快速搜索),低层具有较短的边(用于精确搜索)。
Navigable Small World Graphs(NSW)
NSW图是在 2011–2014 年间提出的一类基于图的近邻搜索结构。其核心思想是构建一个近邻图,使节点同时拥有长距离边和短距离边,从而在搜索过程中既能快速跳转,又能逐步逼近目标,从而提高查询效率。
NSW图中每个顶点都与若干个其他顶点相连。称这些相连的顶点为“friends”,每个顶点都会维护一个friend list,所有节点及其连接关系共同构成了搜索图。
查询时,需要指定一个入口点(entry point),从该节点出发,采用贪心策略不断移动到与查询向量距离更近的相邻节点,样一直迭代。当无法找到更近的邻居时,搜索停止。具体如下所示。
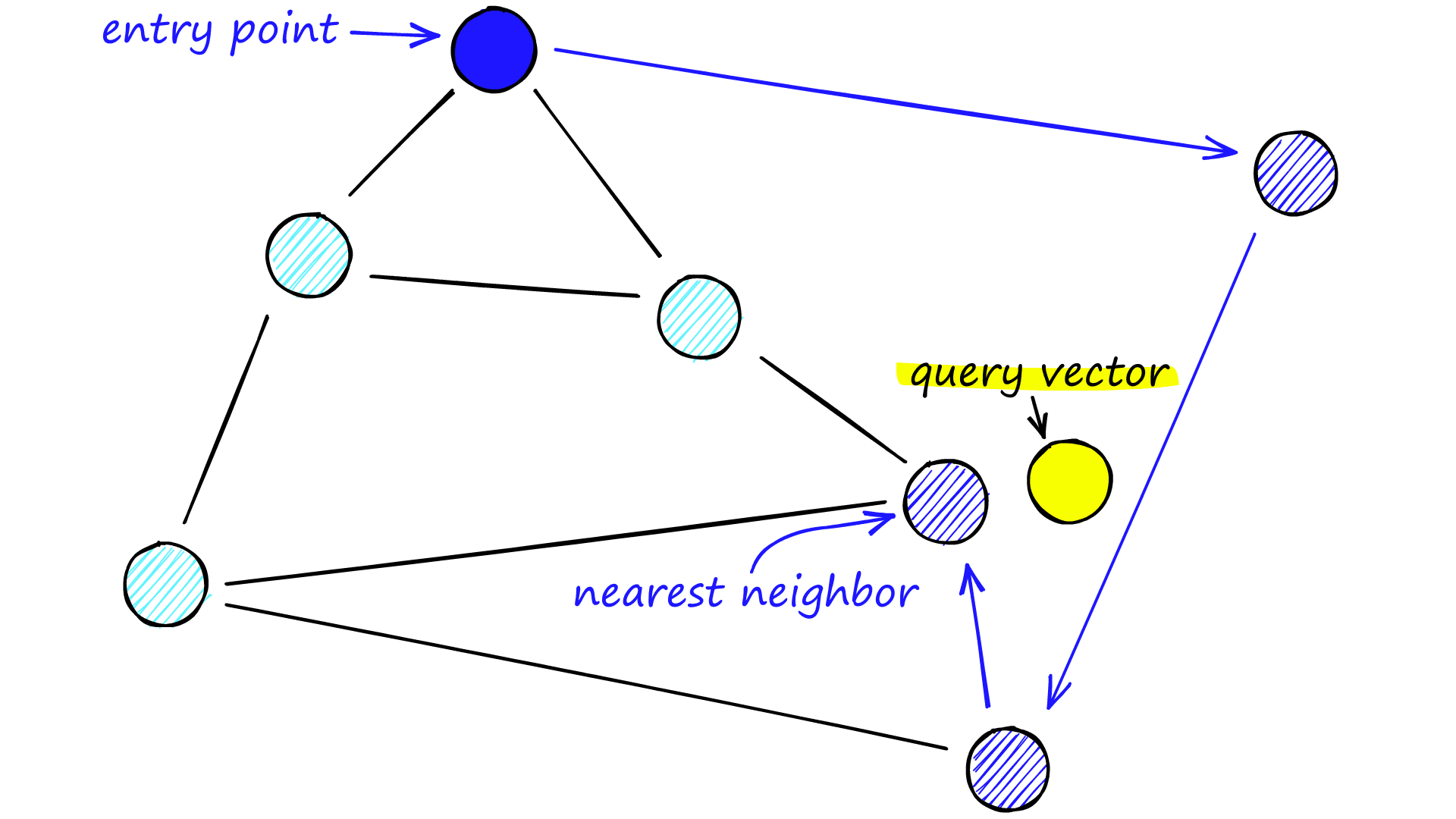
然而NSW通过贪婪算法专注于找到局部最优,当找不到更近的顶点的时候便退出。而在图中节点度数较少的时候,搜索过程容易陷入局部最小值,从而过早终止。
为缓解这一问题,常见的改进思路包括:
- 提高节点的平均度数,以增强图的连通性(但会增加内存和搜索成本)
- 从高度数节点开始搜索,以提升搜索的全局性(这正是 HNSW 的关键设计之一)
度数即图中与节点直接相连的边数
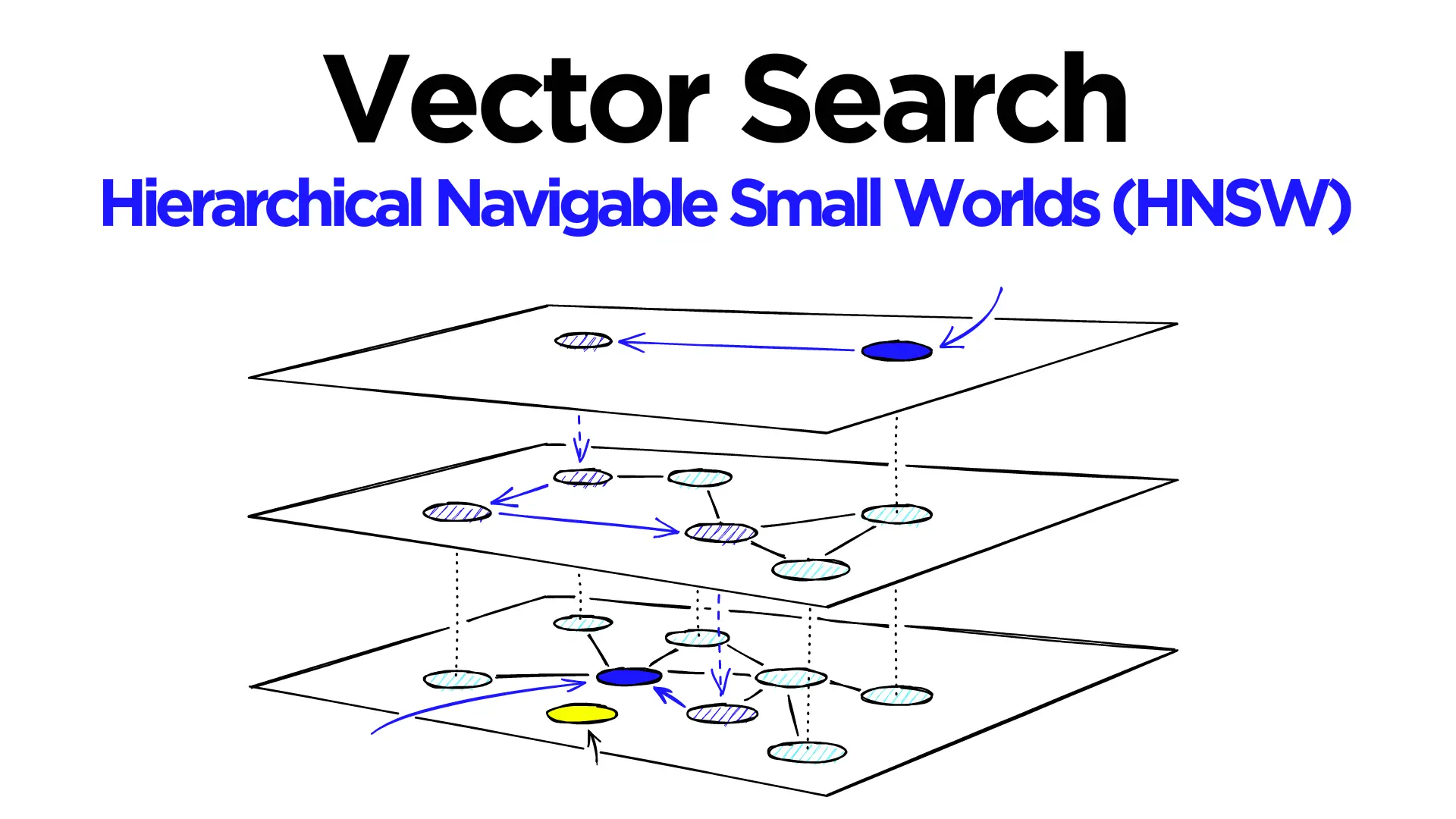
HNSW
HNSW是对NSW自然的改进,同时也借鉴了跳表中分层搜索的思想。
在 HNSW 中:
- 顶层节点数量最少,连接距离最长
- 底层包含全部节点,连接距离最短
- 搜索从顶层开始,逐层向下进行
这种结构使得搜索过程能够先快速定位到“可能正确的区域”,再在底层完成精确搜索。
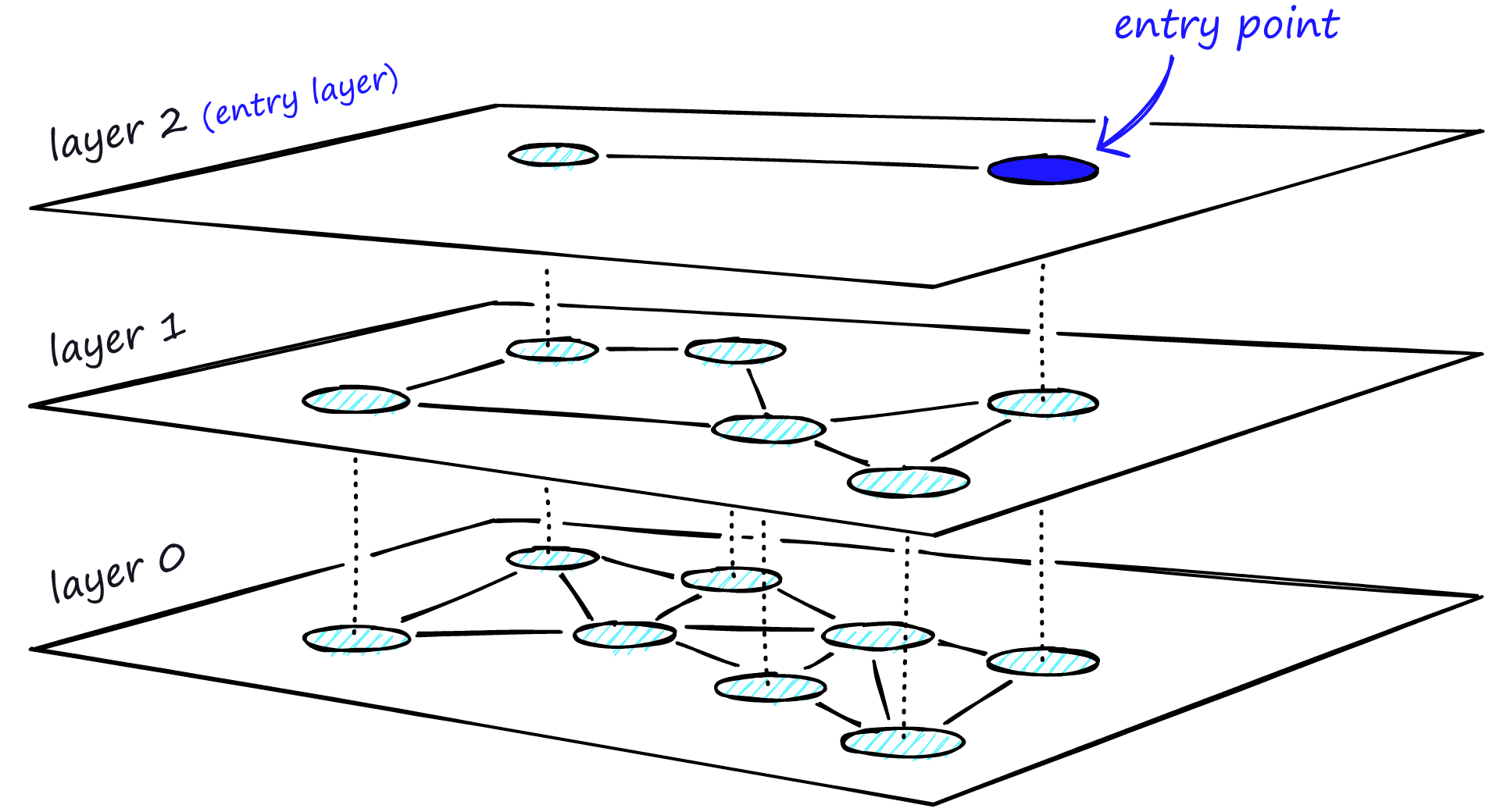
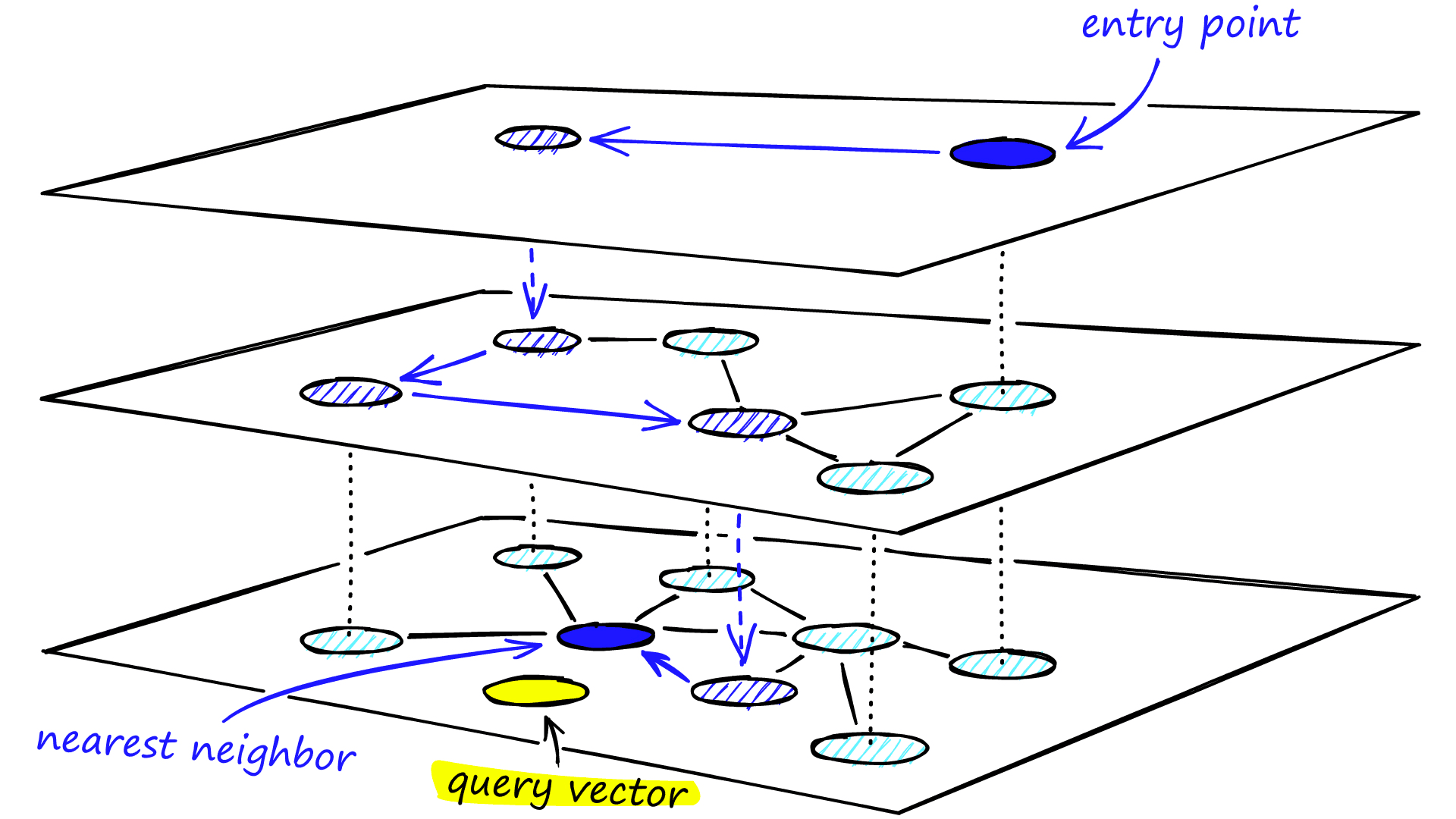
HNSW搜索过程
在搜索阶段,HNSW 使用参数,表示搜索过程中允许维护的候选节点数量上限。
搜索流程如下:
-
从最高层的入口点开始搜索
-
在除第 0 层外的各层,采用宽度为 1 的贪心搜索,逐层向下定位搜索区域
-
进入第 0 层后,以为宽度执行局部图搜索
-
最终从候选集合中返回距离查询向量最近的 K 个节点作为检索结果
整个查找过程如下图所示:
HNSW的构建过程
确定层数和层中节点数
由于HNSW是一种多层索引结构,所以构建HNSW的第一步就是确定层数和每一层所含有的节点个数。
而这两个的确定都与层级乘数这个参数有关,具体计算方法如下:
层数确定:
总层数 的计算公式为:
其中为总节点的个数。
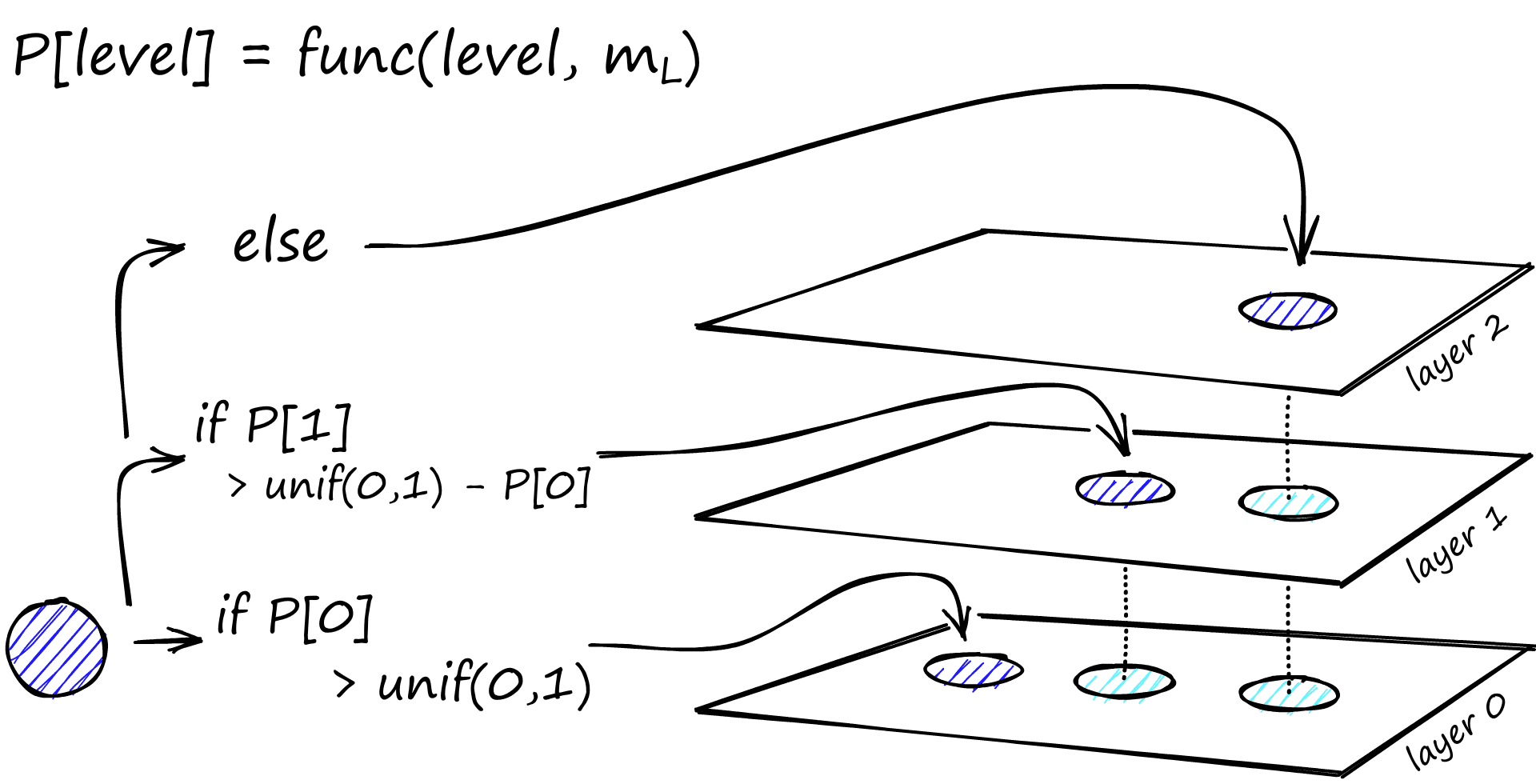
节点层级分配:
在确定了层数后,需要为每个节点分配其所属的层级。算法依次从底层(第0层)开始向上判断,具体步骤为:
- 为每个节点生成一个随机数 。
- 从第0层开始逐层计算累计概率阈值:
- 若 ,则该节点可进入第1层;
- 若继续满足 ,则可继续升至更高层,依此类推。
- 节点最终停留的层级 满足条件:
即节点将分布于第0层至第层。
其中,节点出现在第 层的概率 由下式给出:
整个构建过程如下图所示:
通常设为,其中为节点除第0层外的最大度数
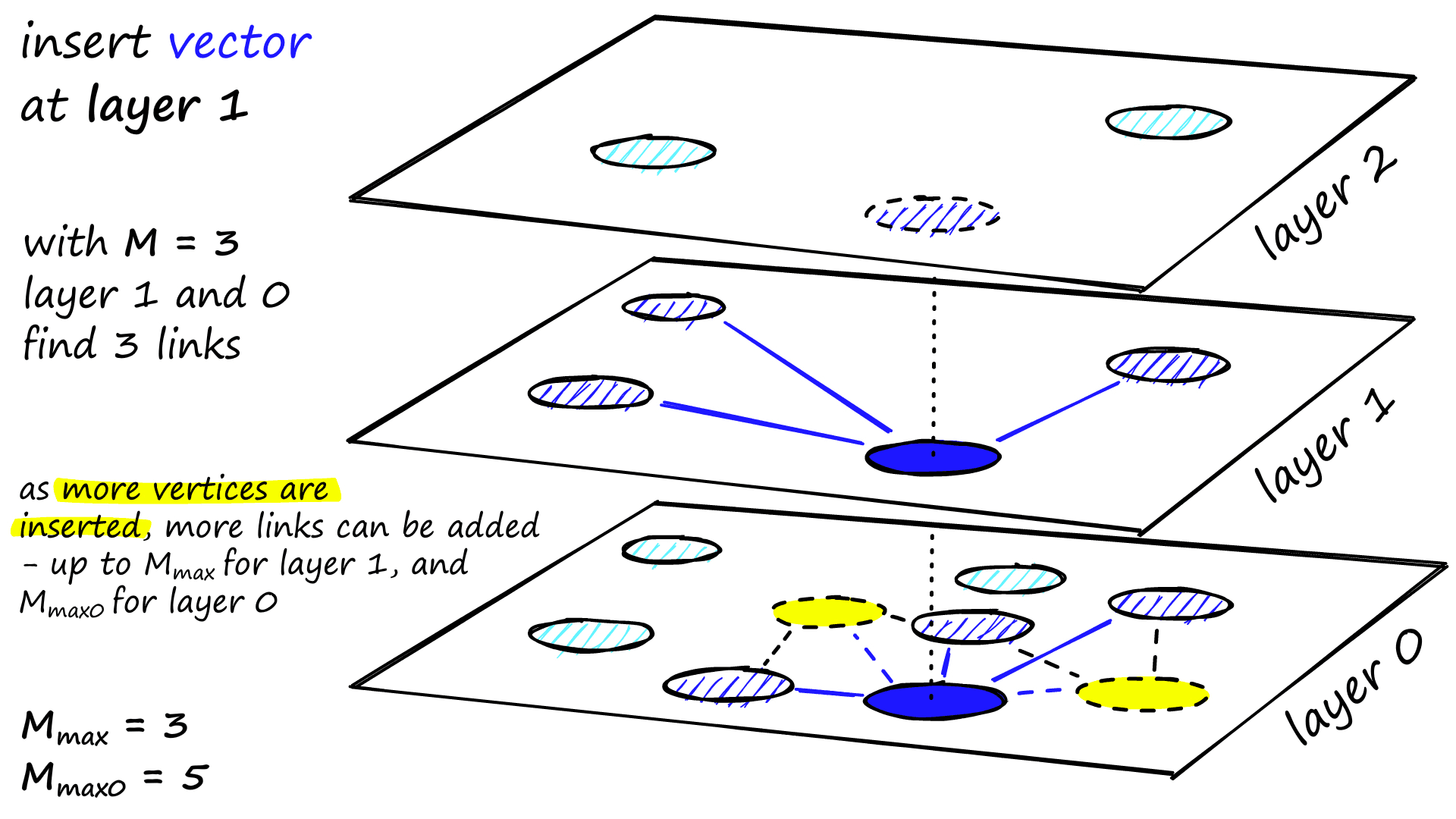
确定节点的连接关系
在确定层数与各层节点数量之后,最后一步是进行连边,即按照特定规则将每层中的节点连接起来。
连接过程需要设定两个重要参数:
- 每层节点最大度数
- 连接候选节点数 (该参数是一种优化手段,通过限制每层参与连边筛选的候选节点数量,以提升构建效率)
连接过程采用自顶向下的方式进行。以节点 的连接为例:
- 从顶层开始,采用贪心搜索算法(此时 )找到当前层与 最接近的节点;
- 进入 实际所在的层级后,将 恢复为预设值,找出该层中距离 最近的 个候选节点;
- 从中选择距离最近的 个节点尝试建立连接。
但在连接至某个已有节点 时,需判断其邻居数是否已达上限:
- 如果 v 的当前邻居数 :直接加边
- 如果 v 的邻居数 :那么会触发剪枝
剪枝过程并非简单保留最近邻、移除较远节点,而是采用一种称为启发式邻居选择的算法,旨在保留那些彼此距离相对较远、但均靠近 的邻居节点。相关实现可参考 hnswlib启发式邻居选择源码:
void getNeighborsByHeuristic2(
std::priority_queue<std::pair<dist_t, tableint>, std::vector<std::pair<dist_t, tableint>>, CompareByFirst> &top_candidates,
const size_t M) {
if (top_candidates.size() < M) {
return;
}
std::priority_queue<std::pair<dist_t, tableint>> queue_closest;
std::vector<std::pair<dist_t, tableint>> return_list;
while (top_candidates.size() > 0) {
queue_closest.emplace(-top_candidates.top().first, top_candidates.top().second);
top_candidates.pop();
}
while (queue_closest.size()) {
if (return_list.size() >= M)
break;
std::pair<dist_t, tableint> curent_pair = queue_closest.top();
dist_t dist_to_query = -curent_pair.first;
queue_closest.pop();
bool good = true;
for (std::pair<dist_t, tableint> second_pair : return_list) {
dist_t curdist =
fstdistfunc_(getDataByInternalId(second_pair.second),
getDataByInternalId(curent_pair.second),
dist_func_param_);
if (curdist < dist_to_query) {
good = false;
break;
}
}
if (good) {
return_list.push_back(curent_pair);
}
}
for (std::pair<dist_t, tableint> curent_pair : return_list) {
top_candidates.emplace(-curent_pair.first, curent_pair.second);
}
}
太长不看版:
输入:top_candidates(候选邻居,按离q的距离排序)
目标:选出 ≤ M 个邻居
1. 若候选数 < M,直接返回
2. 按与 q 的距离从近到远排序
3. 依次尝试加入候选点 u
4. 若 u 被已选邻居“遮挡”,丢弃
5. 否则保留
6. 返回最终邻居集合
例子:如果 A→B 是已选边,并且 B→C 的距离小于 A→C 的距离,那么 A→C 会在启发式邻居选择中被减枝。
同时,这些已连接的点将作为下一层搜索的入口节点,该过程逐层向下迭代,直至达到最底层。在最底层中,每个节点的连接数量上限由参数 控制,通常设置为 。
上述连接操作将对图中的每个节点依次执行,最终完成整个多层图结构的构建。
以上便完成了 HNSW 索引的构建过程。可以看到,整个构建过程中需要主动设置的参数实际只有两个:(每层最大连接数)与 (构建时的候选节点数)。
而在搜索阶段,我们需要设置的参数为 (搜索时的候选队列大小)。
那么,在实际项目中应如何合理配置这三个参数呢?
参数的设置
使用 Sift1M 数据集对上述参数设置进行验证,实验结果如下:
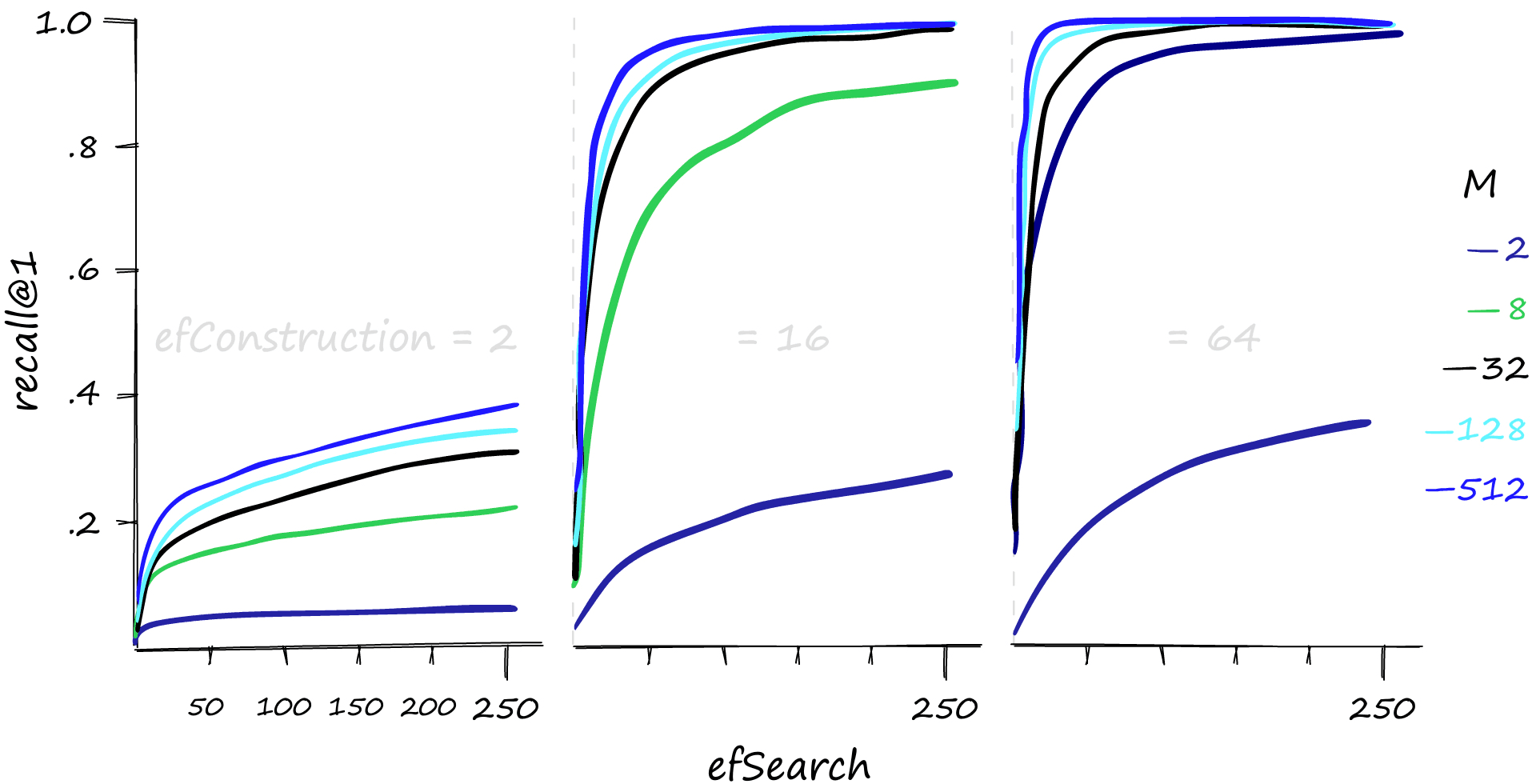
、(即 )和 的值越高,通常越能提升查询的准确率——但需要注意的是,提升效果存在合理区间,并非参数越大性能就会持续提升。
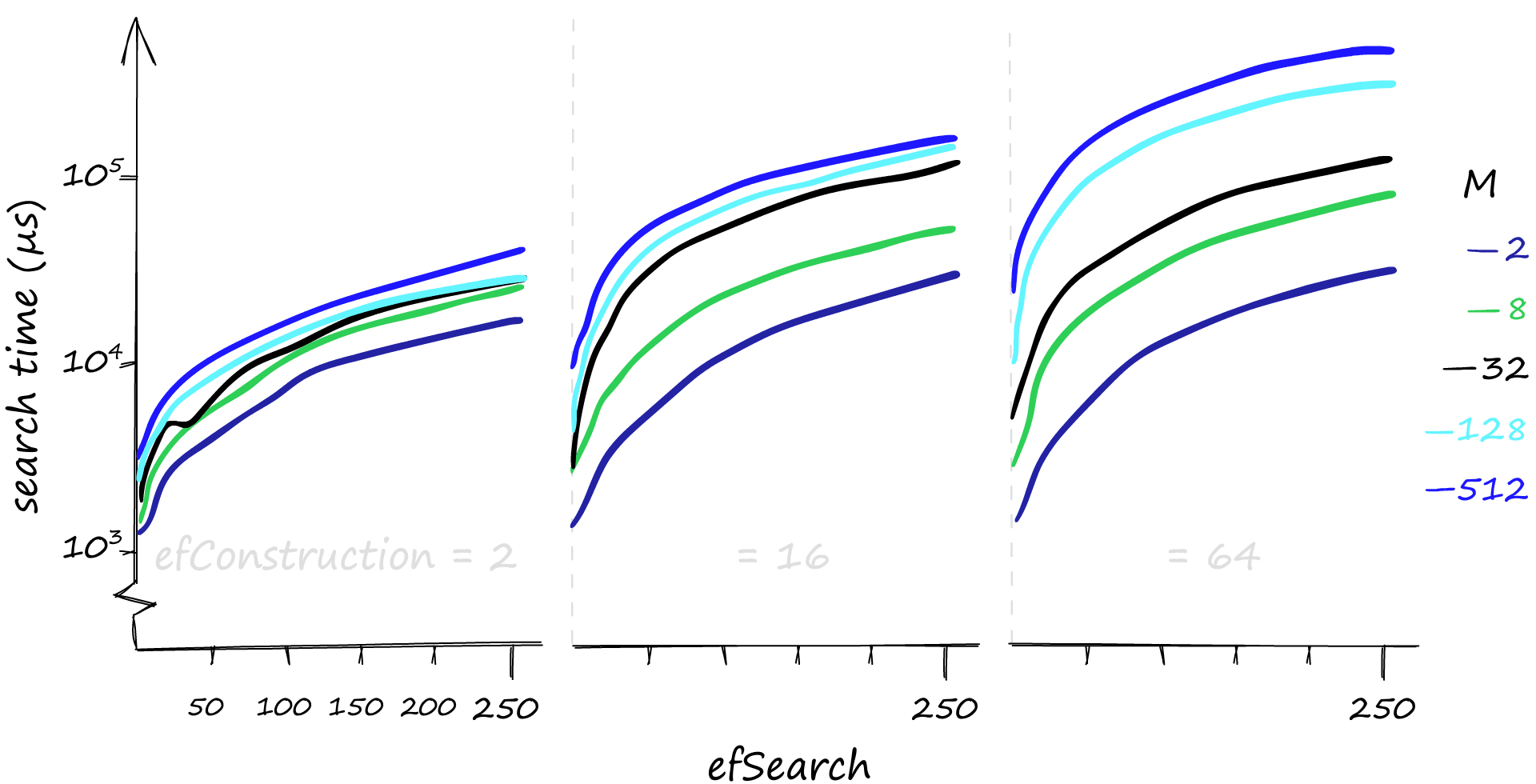
提高 、 和 的参数值,尤其在高并发查询场景下,会显著增加检索耗时。
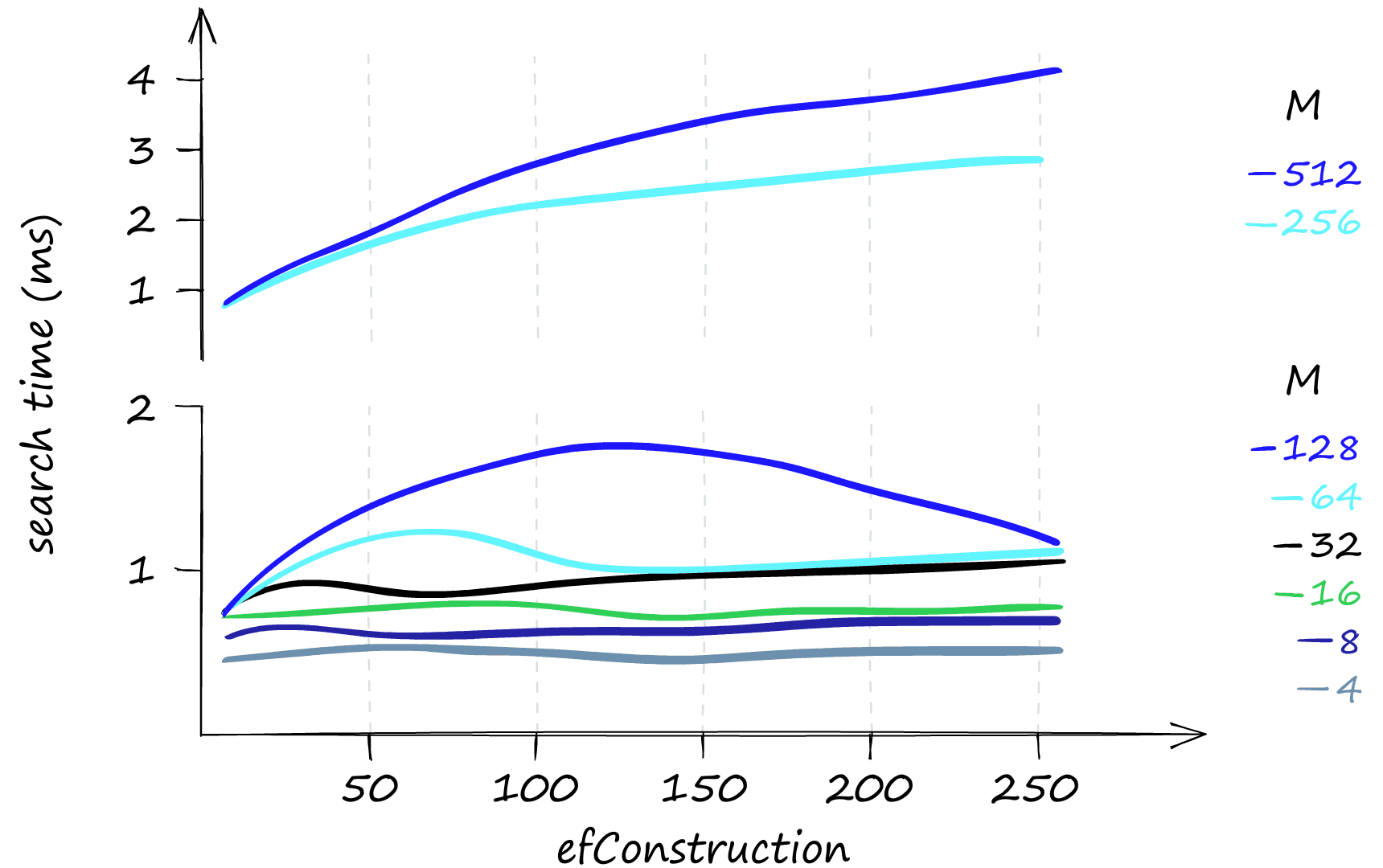
若查询以低并发为主,则提升 参数是最佳选择。该参数能在几乎不影响检索耗时的情况下提高准确率,尤其是在搭配较低的 值时效果更为明显。同时, 对单次查询的耗时影响甚微,尤其是在 值较低的情况下,检索时间几乎不受 变化的影响。
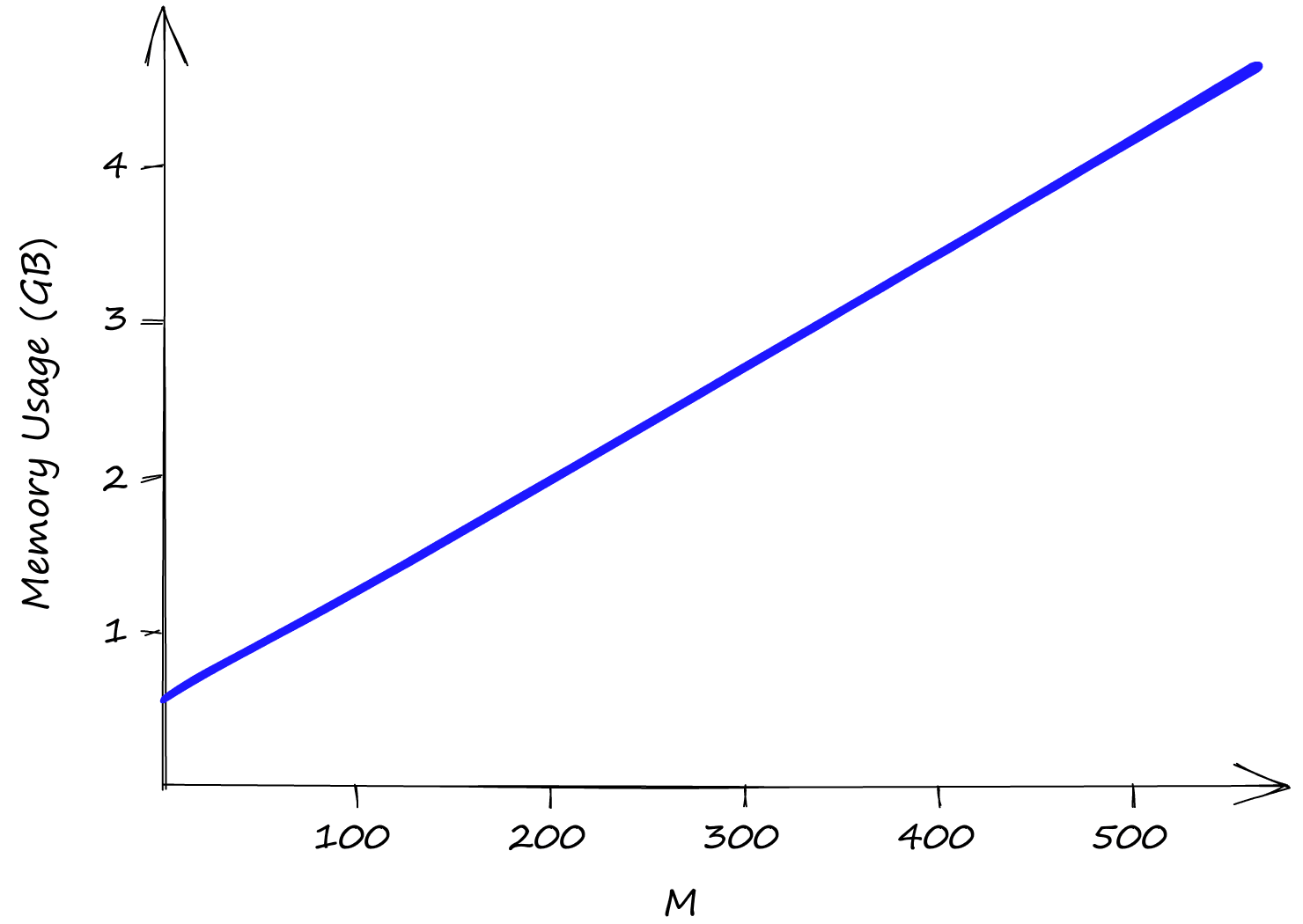
与 参数均不影响索引内存使用量,内存消耗完全由 参数决定。即使将 设为较低值 2,索引大小也已超过 0.5GB;而当 值提升至 512 时,索引容量将接近 5GB。
总结
HNSW 在搜索性能方面表现卓越,但其高内存消耗也意味着更高的基础设施成本。在内存受限的场景中,可以结合 PQ(Product Quantization) 或 IVF 等技术进行折中优化。