感知机算法

感知机是由美国学者Fran Rosenblatt 在1957 年提出来的一种算法,也是作为神经网络(深度学习)的起源的算法。
分类(classification)指的是预测样本所属类别的一类问题。形式化表述,分类问题的目标就是给定输人样本x,将其分配给K种类别中的一种,其中k=1,…,K。如果K=2,则称为二分类,否则称为多分类。
线性分类模型与感知机算法
线性分类模型就是通过一条“线”将数据一分为二。线性模型由特征函数和对应的权重向量组成。
而通过线性分类模型进行分类的话,必须先将样本转化为向量然后有一个感知机分类器才能进行。
特征向量与样本空间
特征向量:描述样本特征的向量。
样本空间:样本分布的空间。
在收集了大量的样本后,可能会得到一个密集的样本空间。
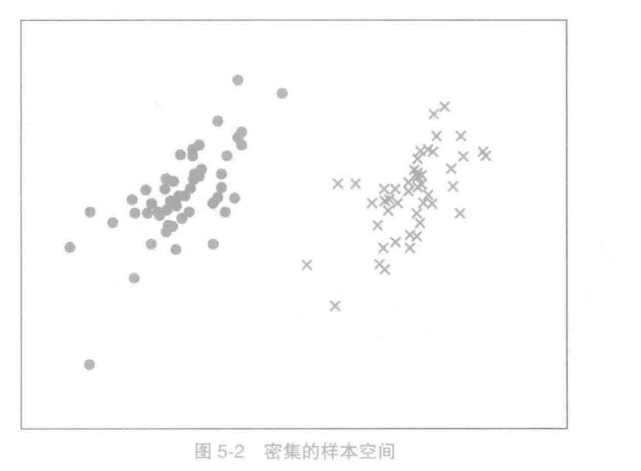
在样本转化为了特征向量后,分类问题实质上就是对样本空间的切割问题。
决策边界与分离超平面
如上图所示,若两个样本可以通过一条直线分开。那么左右两边称为决策区域,而这条直线成为了决策边界。
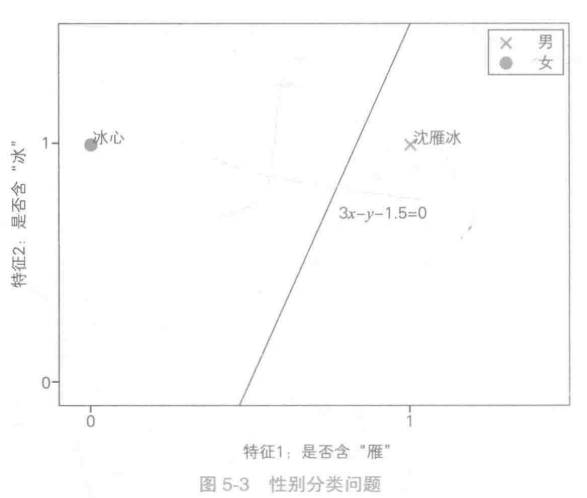
二维空间中,如果决策边界是直线,则称产生该决策边界的模型为线性分类模型。
三维空间中的线性模型用平面做决策,任意维度空间中的线性决策边界统称为分离超平面。

如上图:直线方程为3x-y-1.5=0,那么权重向量为【3,-1,-1.5】,那么“沈雁冰”的特征向量为【1,1,1】
在有了决策边界的方程之后,线性模型使用方程左边的符号来作为最终的决策。
例如:
沈冰雁【1,1,1】带入直线方程3-1-1.5=0.5>0,决策符号为1。
线性可分:如果数据集中所有样本都可以被分离超平面分割。
若出现线性不可分的数据,我们可以采用如下方式来进行分类:
- 定义更多的特征
- 将数据映射到高维度
感知机算法
给定了训练集,可以通过感知机来进行训练线性模型。
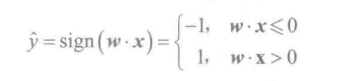
- 读入训练样本,进行预测singn(w • X)
- 计算与正确答案的误差,根据误差进行调参
利用二维平面例子来进行解释,
- 第一种情况是错误地将正样本(y=1)分类为负样本(y=-1)。此时,wx<0,即w与x的夹角大于90度,分类线 l 的两侧。修正的方法是让夹角变小,修正w值,使二者位于直线同侧:
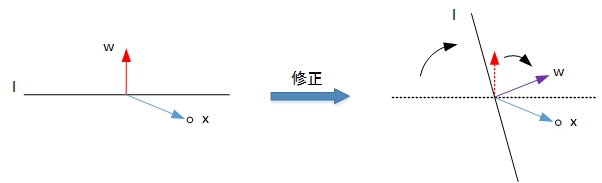
- 第二种情况是错误地将负样本(y=-1)分类为正样本(y=1)。此时,wx>0,即w与x的夹角小于90度,分类线 l 的同一侧。修正的方法是让夹角变大,修正w值,使二者位于直线两侧:
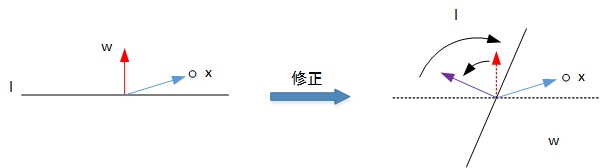
经过两种情况分析,我们发现每次w的更新表达式都是一样的:w:=w+yx。掌握了每次w的优化表达式,那么就能不断地将所有错误的分类样本纠正并分类正确。
例如:

将更新后的w,b带入迭代,由于此时数据比较好,均通过了训练,迭代结束。
代码实现
import numpy as np
import matplotlib.pyplot as plt
# 初始化 w 和 b
w,b = np.array([0, 0]),0
# 向量的点积
def d(x):
return np.dot(w,x)+b
#构造数据
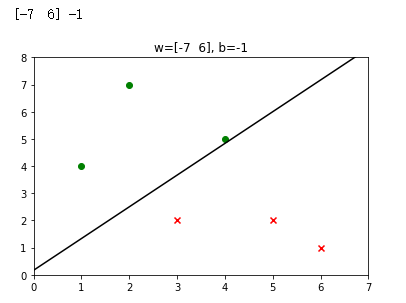
X = np.array([[5,2], [3,2], [2,7], [1,4], [6,1], [4,5]])
Y = np.array([-1, -1, 1, 1, -1, 1])
run = True
while run:#迭代
run = False
for x,y in zip(X,Y):
if y*d(x)<=0:
w,b = w+y*x,y+b
run = True
break
print(w,b)
positive = [x for x,y in zip(X,Y) if y==1]
negative = [x for x,y in zip(X,Y) if y==-1]
line = [(-w[0]*x-b)/w[1] for x in [-100,100]]
plt.title('w='+str(w)+', b='+str(b))
plt.scatter([x[0] for x in positive],[x[1] for x in positive],c='green',marker='o')
plt.scatter([x[0] for x in negative],[x[1] for x in negative],c='red',marker='x')
plt.plot([-100,100],line,c='black')
plt.xlim(min([x[0] for x in X])-1,max([x[0] for x in X])+1)
plt.ylim(min([x[1] for x in X])-1,max([x[1] for x in X])+1)
plt.show()
为了深刻地理解感知机算法原理,则必须了解损失函数等概念。
损失函数与随机梯度下降
在有监督的机器学习算法中,我们希望在训练过程中最小化每个训练样例的误差。这是使用梯度下降等一些优化策略完成的。而这个误差来自损失函数。
损失函数就是来衡量模型在训练集上的错误程度
学习率:对特征向量w,带入损失函数中,称为J(w),对J(w)求导,齐反方向为损失函数减少速度最快的方向。如果该点反方向移动会使损失函数减少,即w=w-a△w,a为[0,1)常数,则a为学习率。
随机梯度下降:每次迭代随机选取部分样本,计算损失函数的梯度,让参数反方向移动。
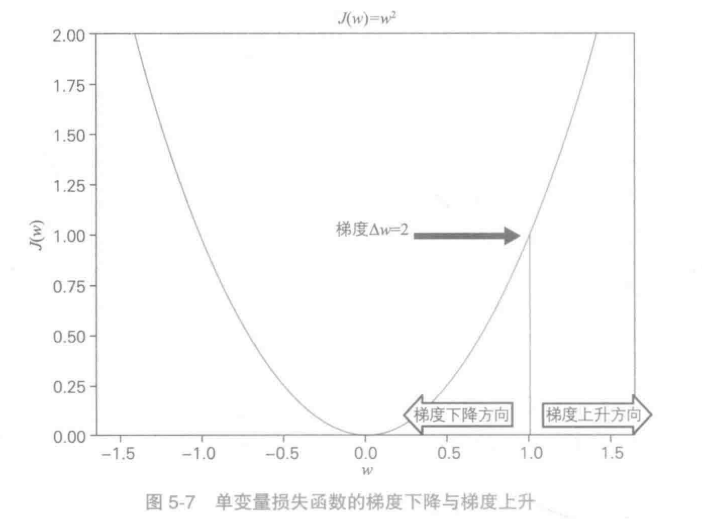
在多维度函数中,一直迭代梯度下降,最终会使损失函数到达底部,函数的最小值。
具体到线性模型中来,感知机的损失函数为错误分类点到超平面的距离:
投票感知机和平均感知机
假设有10 000个实例,模型在前9999个实例的学习中都完美地得到正确答案,说明此时的模型接近完美了。可是最后一个实例是个噪声点,朴素感知机模型预测错误后直接修改了模型,导致前面9999个实例预测错误,模型训练前功尽弃。怎么办呢?
可以采用简单的解决方法:投票感知机和平均感知机
投票感知机:在每次迭代的时候,将参数、准确率都保留。在最后预测的时候每个模型都给出自己的结果,然后乘上对应的准确率加权平均值就得出最终结果。最后结果最高的确立为最终的参数。
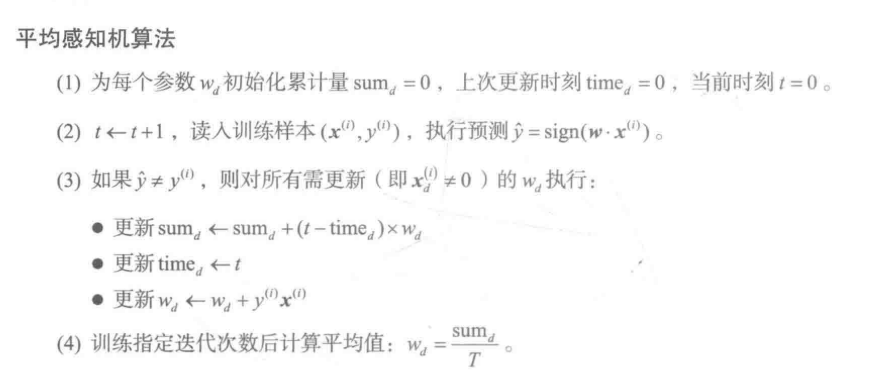
平均感知机:对每次迭代取模型参数加权相加平均,将平均值作为最终结果。
实例
通过使用hanlp来对"赵建军", "沈雁冰", "陆雪琪", "李冰冰"进行性别的分类
from pyhanlp import *
from tests.test_utility import ensure_data
PerceptronNameGenderClassifier = JClass('com.hankcs.hanlp.model.perceptron.PerceptronNameGenderClassifier')#模型提取
TRAINING_SET = os.path.join('./train.csv')
TESTING_SET = os.path.join('./test.csv')
def run_classifier():
classifier = PerceptronNameGenderClassifier()
print('训练集准确率:', classifier.train(TRAINING_SET, 10, False))
model = classifier.getModel()
print('特征数量:', len(model.parameter))
test="赵建军", "沈雁冰", "陆雪琪", "李冰冰"
for name in test:
print('%s=%s' % (name, classifier.predict(name)))#进行预测
print('测试集准确率:', classifier.evaluate(TESTING_SET))
if __name__ == '__main__':
run_classifier()
训练集准确率: P=85.72 R=85.05 F1=85.39
特征数量: 9089
赵建军=男
沈雁冰=男
陆雪琪=女
李冰冰=女
测试集准确率: P=83.35 R=82.82 F1=83.09
总结
感知机模型简单、易学习,是基本的机器学习模型,很多机器学习模型是在感知机模型的基础上变化扩展而得到的。
感知机模型由于其简单,在应用时也有一定的局限,主要体现在以下几点。
- 感知机只能处理线性可分的数据集,线性不可分的数据集会引起分离超平面的震荡而无法收敛。
- 感知机是误分类驱动的模型,模型的解不唯一。离群点对结果影响很大。
- 感知机的判别模型由符号函数给出,无法表示更复杂的非线性映射。